
 English Version
English Version
Dieser Post erschien zuerst auf englisch anderswo und ich wollte ihn jetzt auch mal hier veröffentlichen, mit neuen Bildern, weil ich die alten nicht wiedergefunden habe.
Meine Grundannahme hier ist, dass man sehr viel über ein Land und seine Geschichte im 19. und frühen 20. Jahrhundert erfährt, wenn man sich sein Bahnnetzwerk anschaut. Das beste Tool dafür ist die unglaublich detaillierte OpenRailwayMap, ein Teil des OpenStreetMap-Projekts. Sehr empfehlenswert! Ein Hinweis aber: Ich nutze hier Zoom-Level wo sehr viele Bahnlinien ausgeblendet werden, damit müssen wir einfach leben. Es sollte keinen großen Unterschied machen. Wir fangen an mit meinem Lieblingsbeispiel:
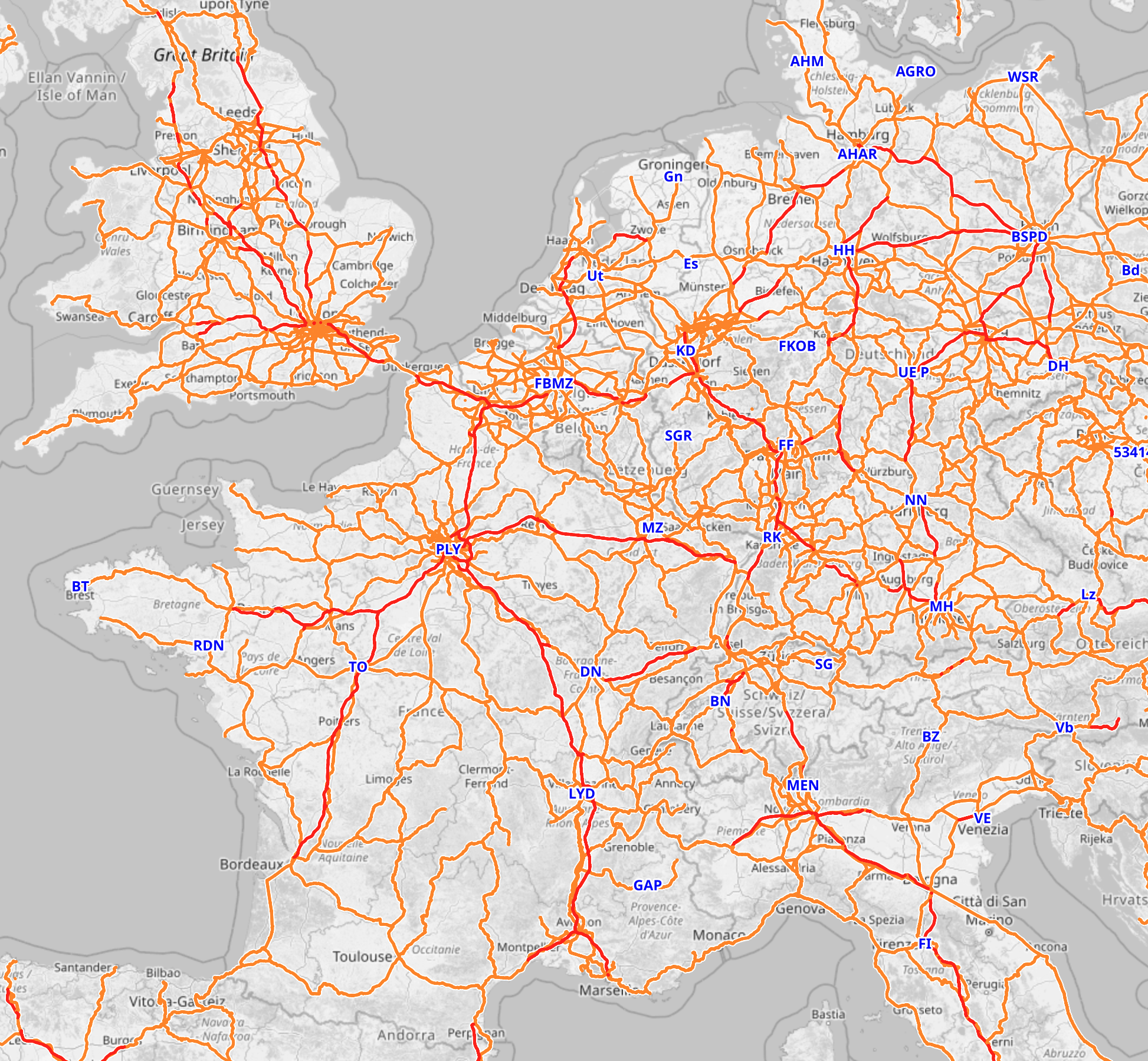
Auf dieser Zoom-Ebene gibt es leider größtenteils keine Städtenamen, nur komische Abkürzungen. Was wir hier sehen sind Frankreich und Deutschland, mit Teilen aller umgebenden Ländern. Frankreich und Deutschland sind dabei die interessantesten. Einerseits ist das deutsche Netz deutlich dichter, andererseits ist die Form komplett anders.
In Frankreich ist der Job der Eisenbahn, Leute nach Paris (PLY, steht für Paris Gare de Lyon) zu bringen. Fast alle Strecken beginnen in Paris und breiten sich dann in die verschiedenen Landesteile aus. Es gibt ein paar Strecken entlang der Küsten und Grenzen, und eine Art Ringstruktur unter anderem durch MZ, DN und TO (Metz, Dijon, Tours), aber das sind sind tendenziell eher Ausnahmen. Diese Struktur ist bekannt als der Legrande-Stern, nach Baptiste Alexis Victor Legrande, dem französischen Minister der dies so erfunden hat. Sein Ziel war es, Verbindungen nach Paris zu schaffen, dem unumstrittenen politischen, kulturellen und wirtschaftlichem Zentrum der Nation. Einige Jahrzehnte später wurde das Konzept von Charles de Freycinet verfeinert und durch viele Nebenlinien in alle Departements ergänzt, aber auch er blieb dabei: Am Ende will jeder nach Paris. Dabei ist es bis heute im wesentlichen geblieben. Selbst die Hochgeschwindigkeitsstrecken, in rot, folgen diesem Muster.
Das Ergebnis ist, dass man in Frankreich fast immer durch Paris fährt, ob man will oder nicht. Lille-Strasbourg? Geht durch Paris. Bordeaux-Dijon?
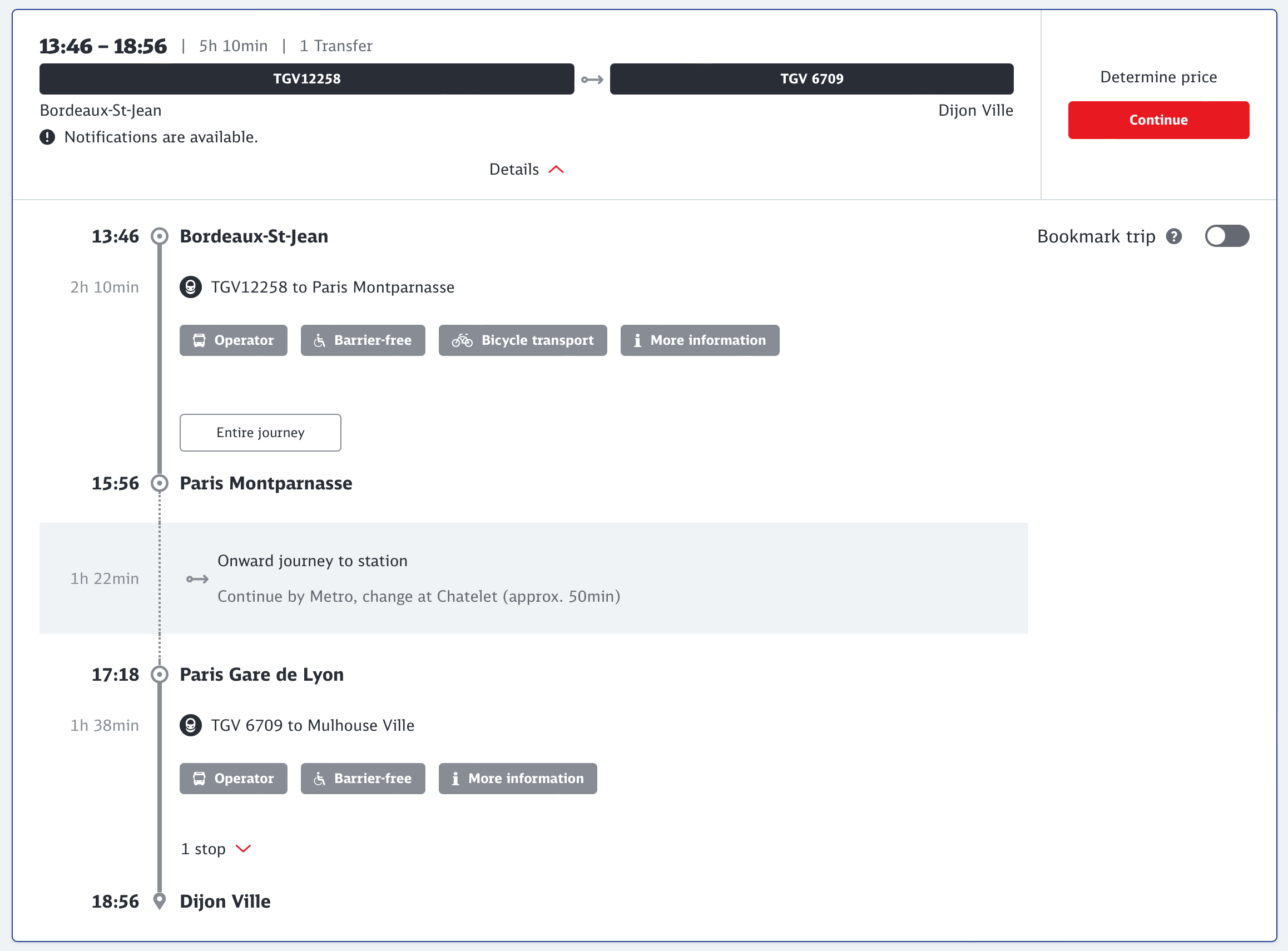
Geht durch Paris, und man darf sich noch seinen eigenen Weg vom Gare Montparnasse zum Gare de Lyon mit der Metro suchen. Es ist nicht mal ein direkter Metro-Zug, man muss in Châtelet umsteigen. Es ist ein gewaltiger Umweg, aber eine andere Wahl hat man nicht.
Selbst da, wo es direkte TGVs zwischen verschiedenen Landesteilen gibt, fahren diese durch den Großraum Paris. Der Unterschied ist nur dass sie nicht im Stadtzentrum enden, sondern z.B. in Disneyland halten.
Im Vergleich dazu ist das Netzwerk in Deutschland nicht nur deutlich dichter, sondern auch furchtbar chaotisch. Es gibt ein bisschen so was wie einen Stern um Berlin (BSPD, benannt nach Berlin-Spandau; wieso die Kartensoftware das ausgewählt hat weiß ich auch nicht), aber viel, viel kleiner, im Prinzip nur durch Brandenburg hindurch. Hamburg (AHAR) und München (MH) haben noch kleinere Sterne, aber wir haben auch größere Netze im Ruhrgebiet (um KD) oder bei Frankfurt (FF). Rote Hochgeschwindigkeitsstrecken wirken fast zufällig verteilt. Einige führen nach Berlin, aber viele auch gar nicht, wie zum Beispiel Köln-Frankfurt oder Hannover-Würzburg.
Und das reflektiert die Geschichte. Frankreich war schon lange vor der Eisenbahnzeit vereinigt und zentral verwaltet. In Deutschland dagegen ist die Eisenbahn je nach Sichtweise älter als Deutschland im modernen Sinn selbst. Klar wurden viele Strecken erst nach der Reichseinigung 1871 gebaut, aber die Grundstruktur des Landes hat sich schon seit dem Mittelalter komplett anders entwickelt. Berlin ist mit Abstand die wichtigste Stadt… aber nicht mit großem Abstand. Hamburg mit dem Hafen und der Presse, Frankfurt mit dem Flughafen, die Millionenstädte München und Köln, das ganze Ruhrgebiet und so weiter sind alles selbst bedeutende Orte. Das Bahnnetz, was eben keinen definierten Kernpunkt hat, reflektiert das.
Was man hier nicht so gut sieht sind die Ergebnisse der Teilung, aber man kann es erahnen. Viel mehr rote Hochgeschwindigkeitsstrecken gehen in Nord-Süd als in Ost-West-Richtung. Noch heute ist ja z.B. Köln-Dresden eine sehr schmerzhafte Erfahrung mit der Deutschen Bahn. Allgemeiner sieht man auch hier, dass ein französisches Hochgeschwindigkeitsnetz in Deutschland nicht so einfach ist. Wenn alle Linien zu einem Punkt wollen, dann kann man das Netz recht einfach planen, aber Deutschland mit seiner eng vernetzten Struktur bräuchte deutlich mehr Kilometer Strecke um ähnliches zu erreichen. Und auch eine Regierung die bereit ist, dieses Geld auszugeben, aber das ist ein anderes Thema.
Andere Länder in Europa sind irgendwo dazwischen. Spanien ist beispielsweise stark um Madrid zentralisiert.

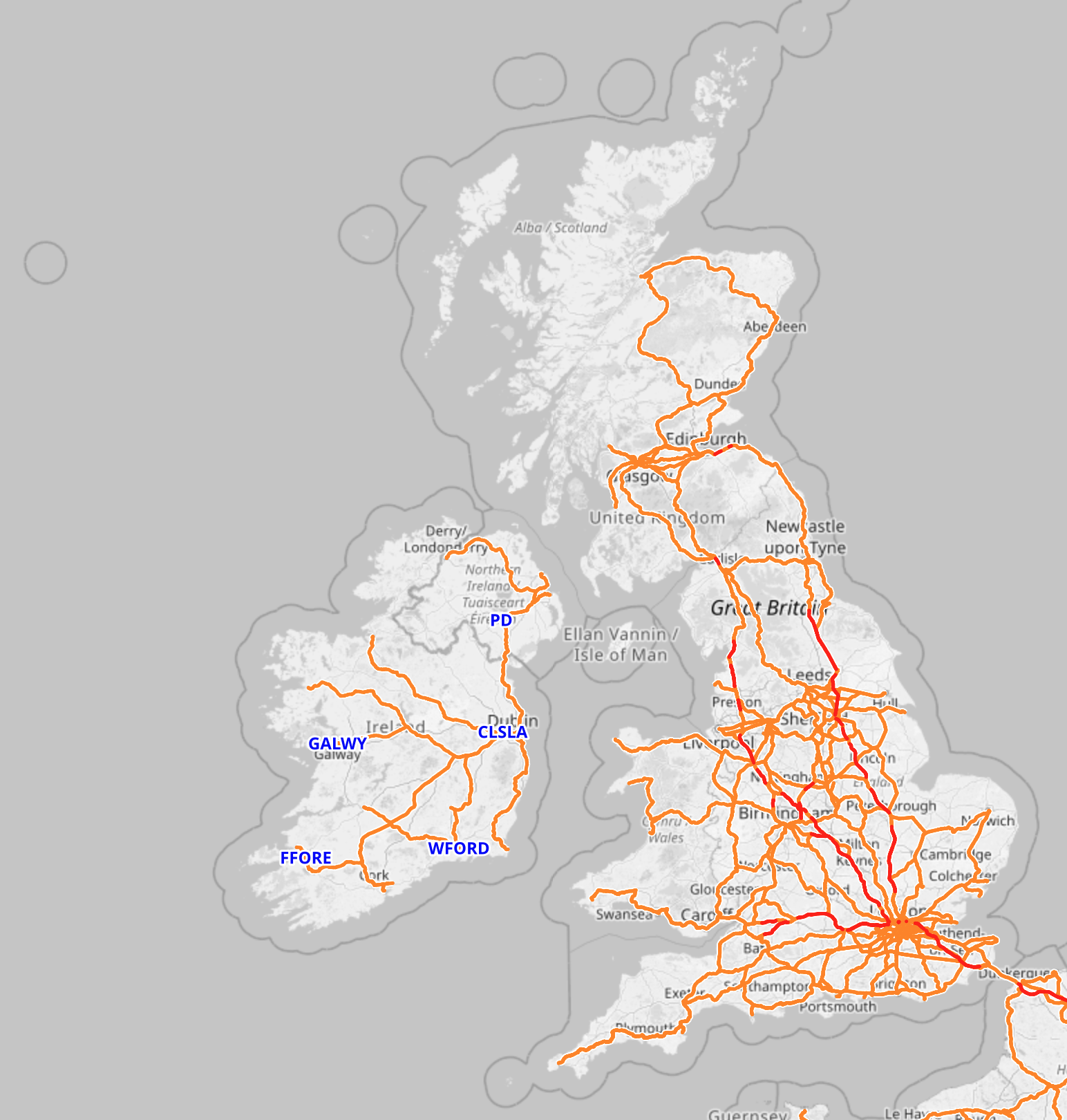
Das Vereinigte Königreich ist so genau so stark auf London ausgerichtet wie Frankreich auf Paris, aber es gibt auch größere regionale Netze zum Beispiel um Leeds und Sheffield, und leicht verrückte Sachen wie in Schottland mit seinen derzeit vier verschiedene Strecken zwischen Glasgow und Edinburgh.
Italien, besonders südlich der Po-Ebene, sieht fast wie eine Leiter aus: Eine Strecke links des Apennin, eine rechts, nur sehr wenige teure Ost-West-Verbindung durch. Die Hochgeschwindigkeitsstrecken sind letztlich nur eine Strecke einmal den Stiefel runter, und bleiben zwischen den beiden Küstenlinien.

Das geht auch außerhalb Europas. Zu sagen dass die USA wie Deutschland sind wirkt vielleicht etwas verwirrend, aber die Karte zeigt es klar.
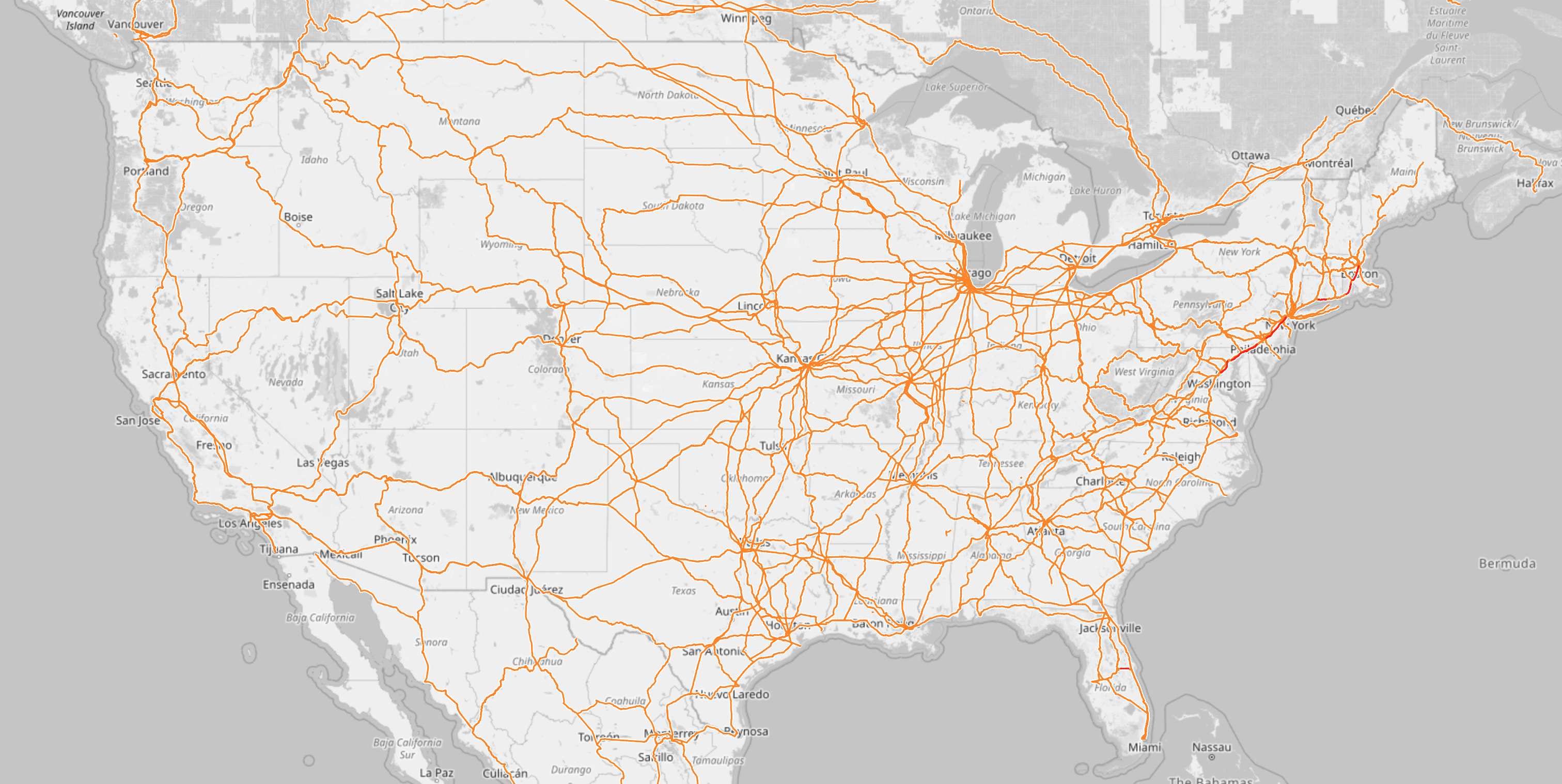
Die Skala ist ganz anders, aber wir haben auch hier wieder ein stark föderales Land ohne ein klares Zentrum. New York und Los Angeles sind groß, aber keins ist das übermächtige Zentrum des Landes. Was die USA so interessant machen ist, dass es fast ein Farbverlauf ist: Je weiter man nach Westen kommt, desto dünner wird das Bahnnetz. Aus dem Muster fallen vor allem die Alleghenies, hoch und teuer für den Bahnbau, mit nur einigen wenigen Linien durch oder drum herum. Auch schön zu sehen ist das Dichte Netz um Chicago, wo sich die meisten Bahnen treffen. Auch interessant sind die vielen duplizierten Strecken, z.B. die vielen Wege um von Chicago nach Memphis oder nach Cleveland zu kommen. Das ist das Ergebnis von verschiedenen Bahngesellschaften die sich gegenseitig hassten, und zum Teil auch heute noch hassen.
Ich lasse hier mal Japan, China und Indien aus, weil der Post auch so schon zu lang wird, aber es gibt auch interessante Sachen außerhalb der “industrialisierten Welt”. Speziell zum Beispiel in Afrika südlich der Sahara, wo merkwürdige Muster entstehen.

Die Auswahl ist etwas beliebig, man findet ähnliche Muster auch anderswo südlich der Sahara und in einem Fall (Mauretanien) mitten in der Sahara. Die Strecken gehen von der Küste aus ins Landesinnere. Die einzelnen Strecken im Landesinneren sind mit diesen Strecken verbunden, die Kartensoftware zeigt sie nur auf der Zoom-Stufe nicht an.
Diese Bahnstrecken sind gedacht um die Ressourcen aus einem Land zu holen, und sonst nicht viel mehr. In Mauretanien (nicht im Bild) ist das Eisenerz, in anderen Ländern vieles anderes, wie andere Erze, Mineralien, landwirtschaftliche Produkte, Gewürze, Farbstoffe und so weiter. Diese werden auf einen Zug geladen, der bringt sie zum Hafen, und von da geht es zum Weltmarkt.
Dieses Muster dient nicht dazu, ein Land wirklich wirtschaftlich zu entwickeln und eine verarbeitende Industrie aufzubauen. Wenn das Ziel interner Verkehr wäre, würde man ja erwarten, dass genauso viel Verkehr auf die Küste zuführt wie ungefähr parallel zur Küste verläuft. Klar, man kann Sachen mit Küstenschiffen transportieren, aber das Umladen kostet Zeit und Aufwand und damit Geld. In entwickelten Ländern findet man häufig Strecken parallel zur Küste, entweder fast direkt am Wasser oder etwas mehr im Landesinneren. Hier fehlt das komplett.
Jede dieser Strecken zeigt prinzipiell, dass an ihrem Ende etwas wirtschaftliches interessantes existiert, sonst wäre sie nicht da. Es würde Sinn machen, Handel zu betrieben und die interessanten Güter aus Togo in Benin zu verkaufen, und die interessanten Güter aus Benin in Togo. Das war nicht das Interesse der Bahnbauer hier. Das Ziel ist, die interessanten Waren auf ein Schiff ins Mutterland zu bringen, und hin und wieder Soldaten ins Landesinnere.
Heutzutage ist diese Sektion, die ich hier gescreenshottet habe, ein riesig großer Wirtschaftsraum voller riesiger Städte. Abidjan hat mehr als vier Millionen Einwohner, mehr als Berlin. Lomé hat 1,7 Millionen, Cotonou und Porto-Novo kommen zusammen auf ungefähr eine Million, und niemand weiß wirklich sicher wie es in Lagos ist, aber es wohl mindestens 14 Millionen und der Großraum könnte bei 24 Millionen sein. Dieses Städteband kann, nach Ansicht von Wissenschaftlern, in den nächsten Jahrzehnten ähnlich wichtig werden wie Washington-Philadelphia-New York-Boston in den USA, oder Tokyo-Osaka in Japan.
Und es gibt einfach keine passende Bahnverbindung. Weder für Güter noch für Passagiere. Beides würde Handel zwischen diesen Orten beleben, Verbindungen zwischen den Menschen aufbauen, und einfach sehr nützlich sein. Aber die Kolonialmächte, die diese Strecken bauten, hatten daran kein Interesse. Es ging nur darum die Ressourcen der Länder auszubeuten.
Das heißt natürlich nicht dass diese Strecken heutzutage böse sind. Ressourcen zu verkaufen ist immer noch besser als gar kein Geld ins Land zu bringen. Und nebenbei verbinden sie in vielen Staaten durchaus die wichtigsten Städte, weil sich diese um Bahnhöfe und entsprechende Anlagen gebildet haben. Aber sie sind bei weitem nicht so nützlich, wie sie sein könnten.
Ein sehr gutes Beispiel wie es anders sein könnte ist ein Land, wo die Kolonisten Siedler waren und ein ökonomisch erfolgreiches Land aufbauen wollten, in Australien:
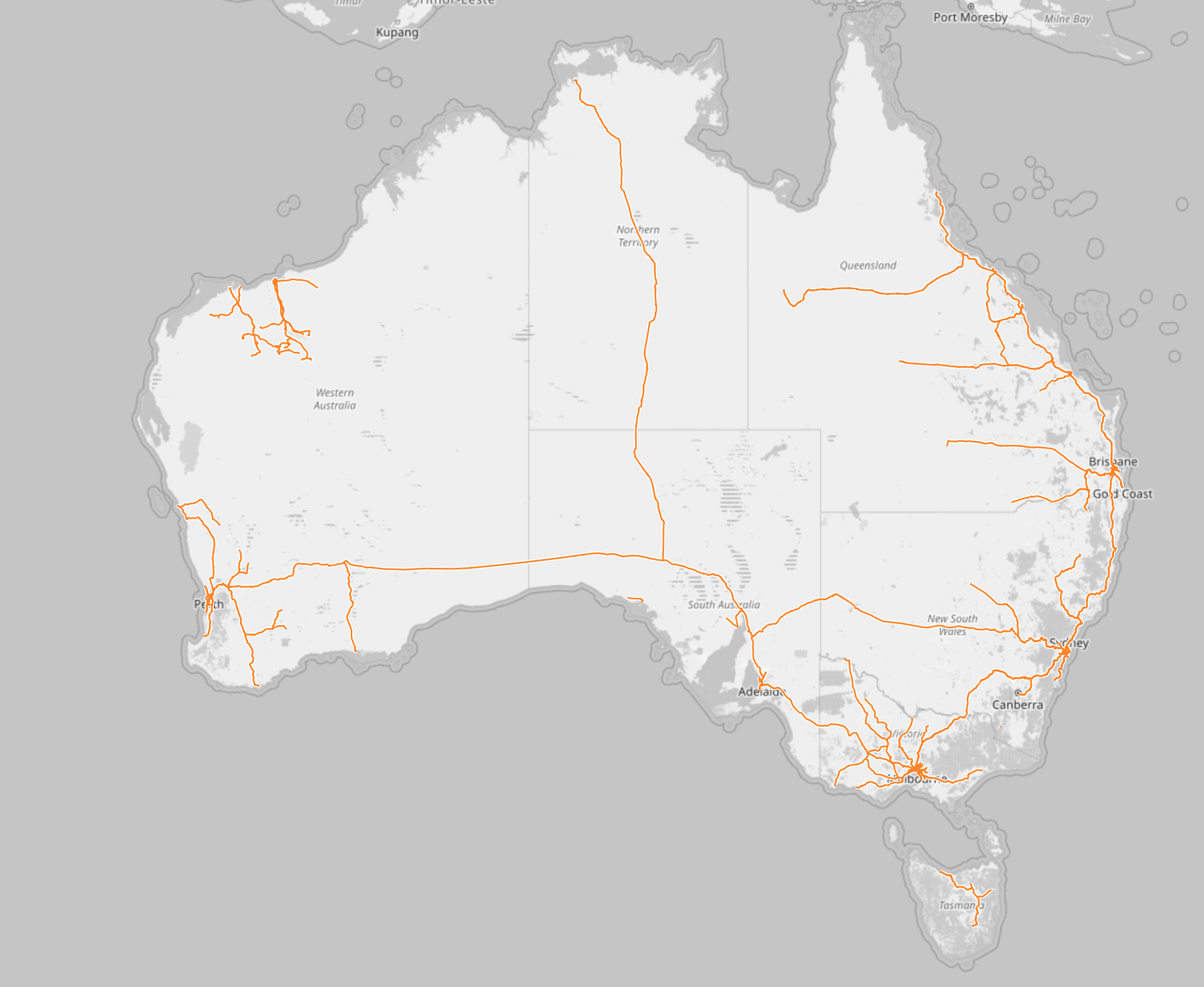
Auch hier gibt es wieder die Strecken von der Küste ins Landesinnere. Aber dazu gibt es noch andere: Strecken entlang der Ostküste, zum Beispiel, und gleich zwei transkontinentale Eisenbahnen die beide Aussehen wie ein teures Regierungsprojekt. Auch Australien hat natürlich seine Merkwürdigkeiten bei den Bahnen, aber nur ein paar zusätzliche Strecken machen das Netz viel nützlicher als die afrikanischen Beispiele. Das Ziel ist nicht nur Waren zum Schiff zu bringen.
(Mit Ausnahme der Pilbara-Region im Nordwesten mit ihrem Wollknäuel. Die Strecken dort führen alle von Eisenerzbergwerken zu Häfen, wobei jede Mine und jeder Hafen einem anderen Konzern gehört. Da diese sich nicht mögen, hat jede ihre eigene Strecke, daher das Durcheinander. Die Züge hier sind übrigens die schwersten der Welt.)
Das ist letztlich was ich sagen wollte. Die Karte der Bahnstrecken eines Landes sagen unheimlich viel darüber aus, wie ein Land funktioniert, beziehungsweise wie es im 19. und frühen 20. Jahrhundert funktioniert hat. Wo sie hinführen und wo nicht zeigt, welche Verbindungen damals als wichtig galten. Und damit haben sie wiederum die Entwicklung dieser Länder beeinflusst. Ich finde das faszinierend.


{kind=link}